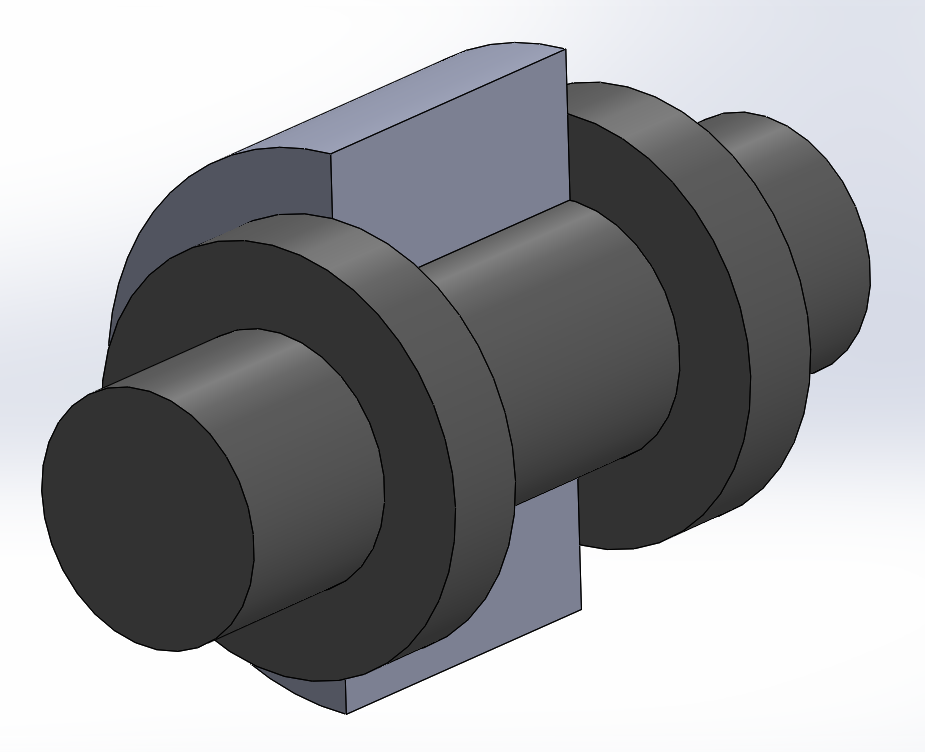
Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Descrição
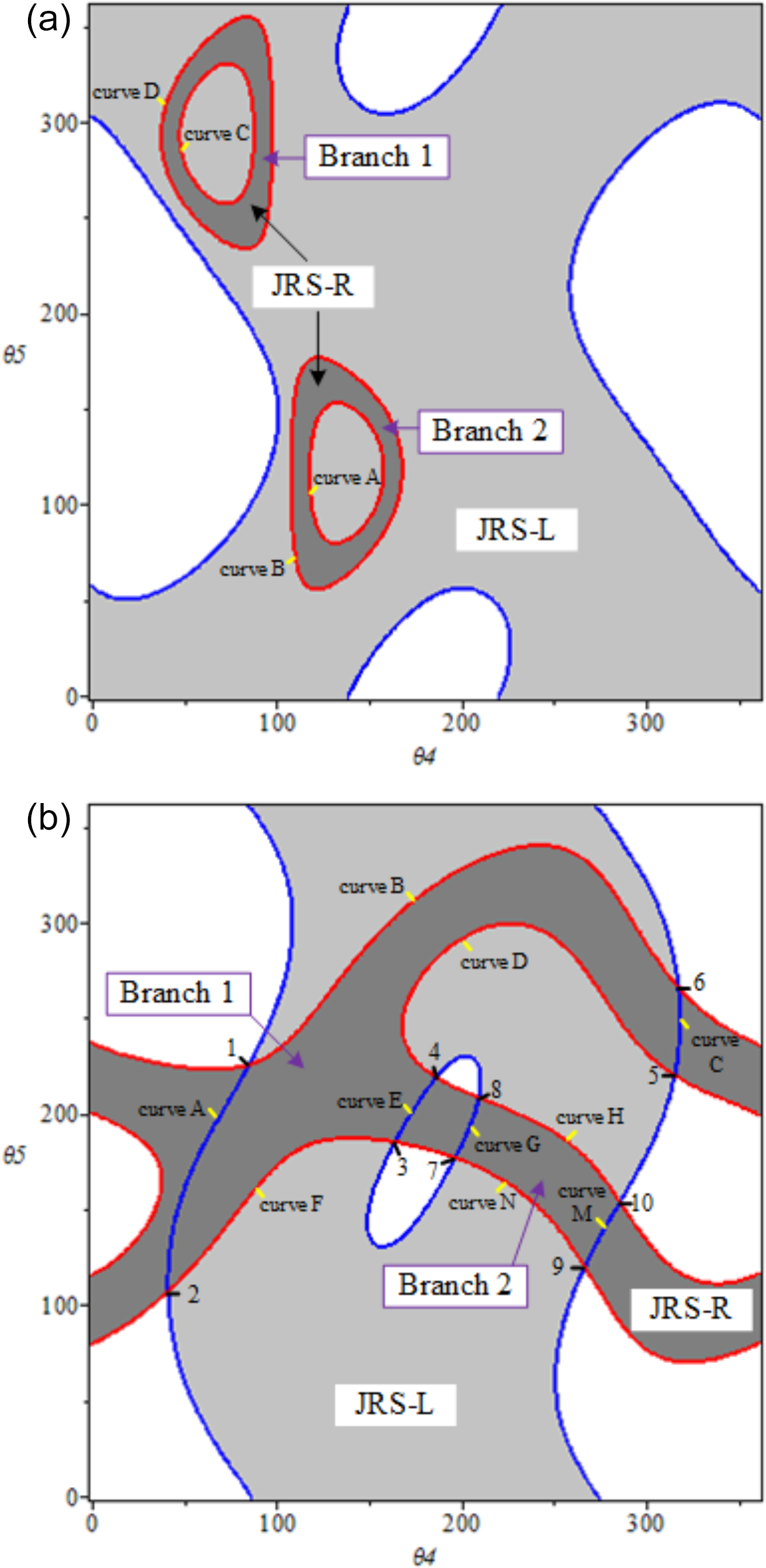
MS - Singularity and branch identification of a 2 degree-of-freedom (DOF) seven-bar spherical parallel manipulator

Kinematics analysis of a 3-DOF joint for a novel hyper-redundant robot arm

A Novel Design of Extended Coaxial Spherical Joint Module for a New Modular Type-Multiple DOFs Robotic Platform
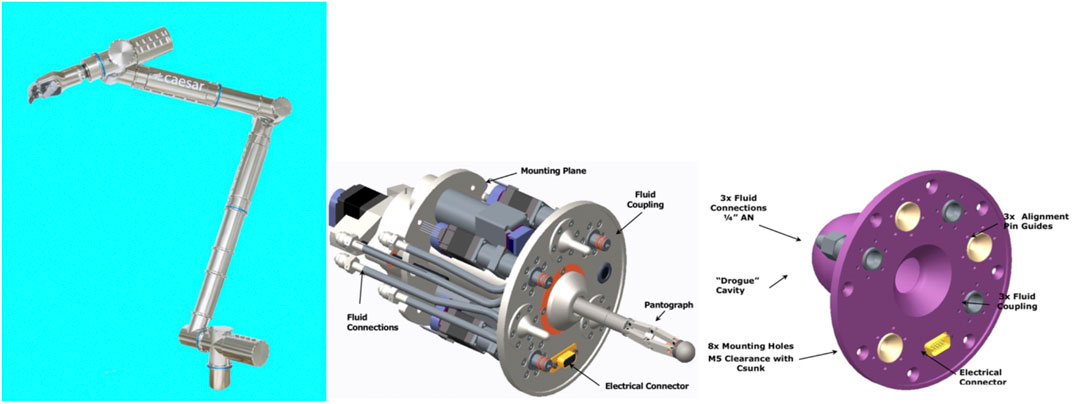
Frontiers Robotic Manipulation and Capture in Space: A Survey

A 3-RRR Spherical Parallel Manipulator Reconfigured with Four-bar Linkages

Chapter 2

Design and Prototyping of a Spherical Parallel Machine Based on 3-CPU Kinematics
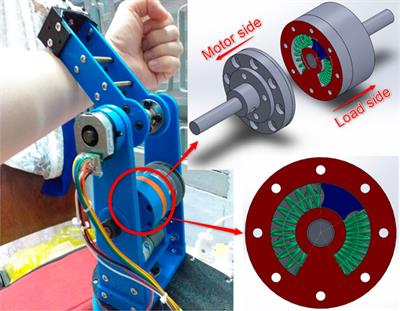
Frontiers Modelling and Control of a 2-DOF Robot Arm with Elastic Joints for Safe Human-Robot Interaction
Revolute Joint: Most Up-to-Date Encyclopedia, News & Reviews

Comparison of 3-DOF asymmetrical spherical parallel manipulators with respect to motion/force transmission and stiffness - ScienceDirect
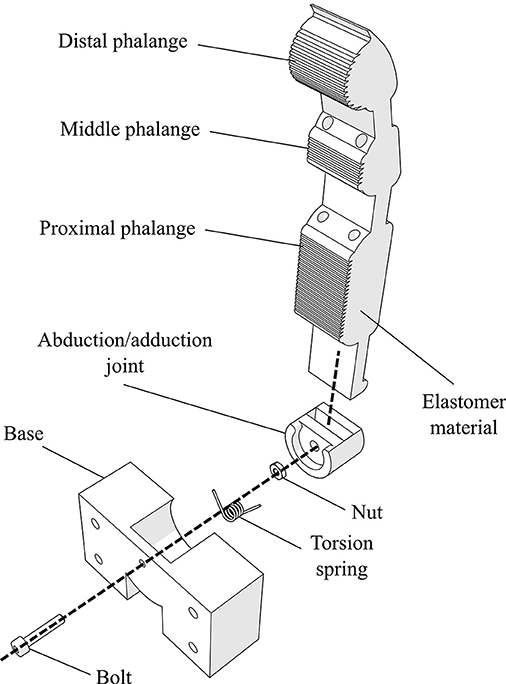
Frontiers An Adaptive Actuation Mechanism for Anthropomorphic Robot Hands
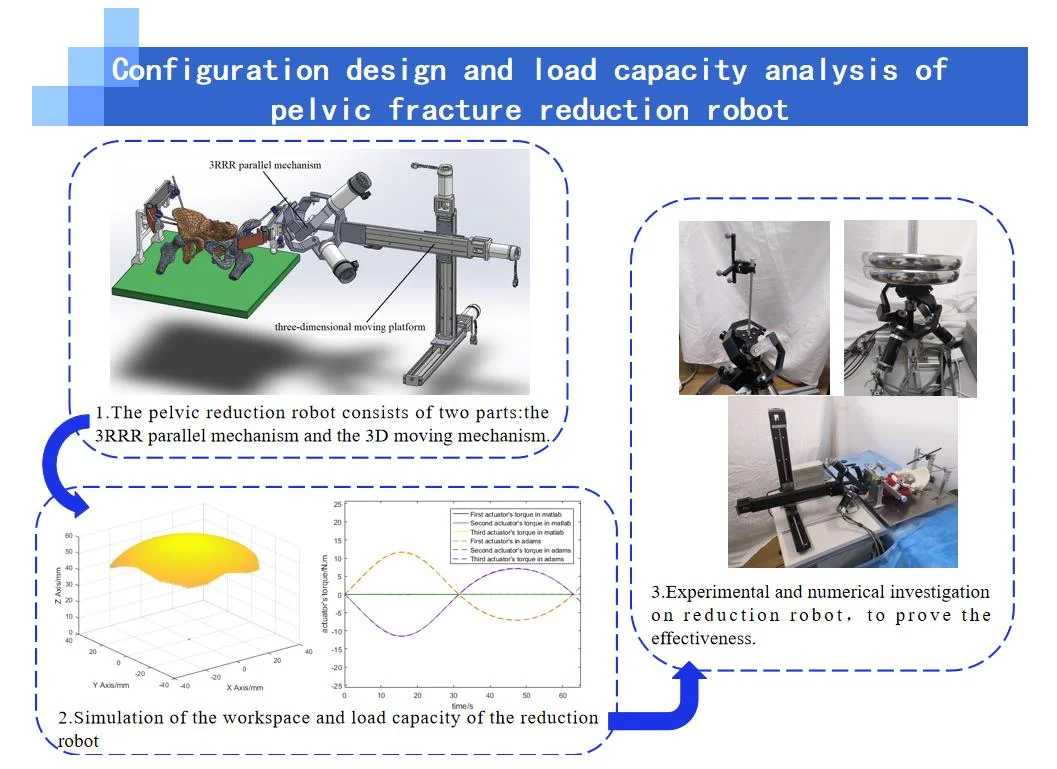
Configuration design and load capacity analysis of pelvic fracture reduction robot - Extrica
de
por adulto (o preço varia de acordo com o tamanho do grupo)