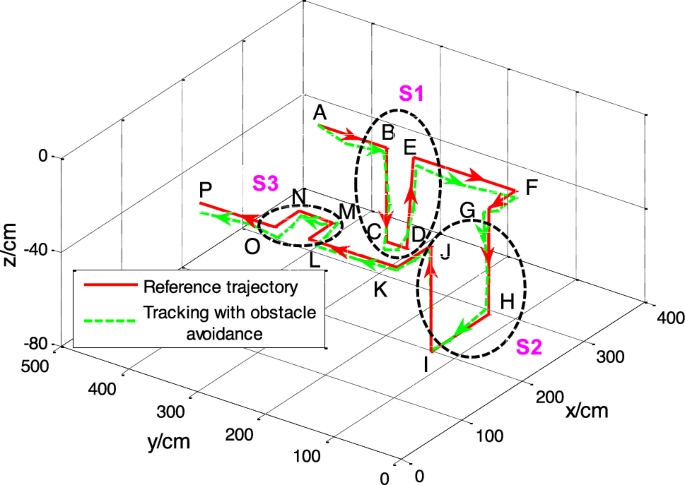
Frontiers Path Following, Obstacle Detection and Obstacle Avoidance for Thrusted Underwater Snake Robots
Por um escritor misterioso
Descrição

Upgraded trajectory planning method deployed in autonomous exploration for unmanned aerial vehicle - Tong Zhang, Jiajie Yu, Jiaqi Li, Jianli Wei, 2022
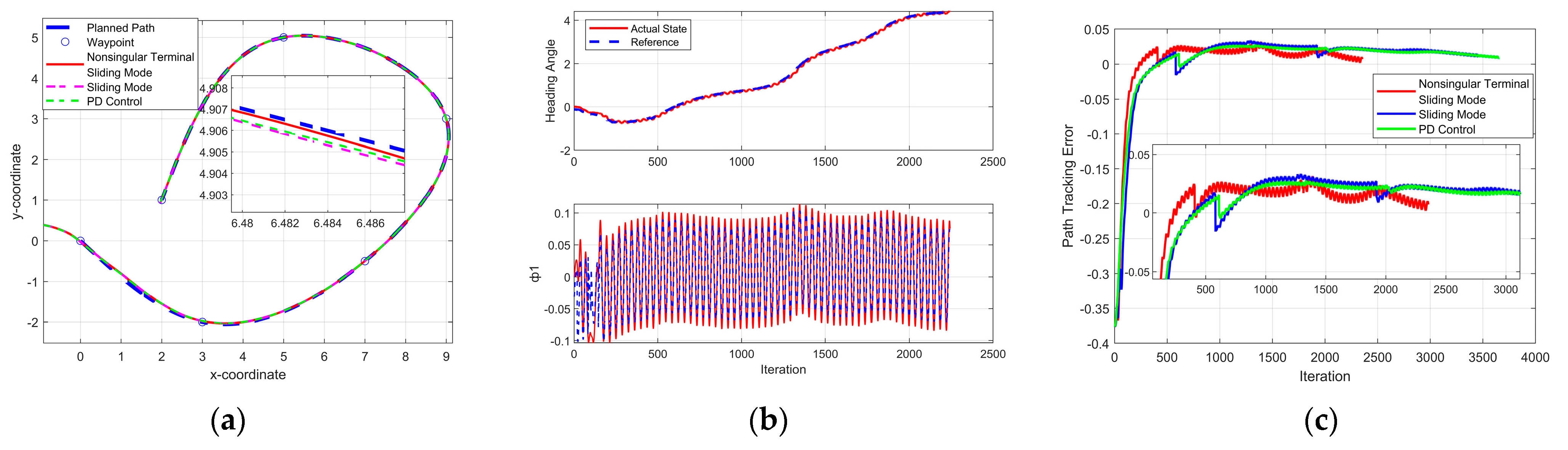
Tracking Control in Presence of Obstacles and Uncertainties for Bioinspired Spherical Underwater Robots

Figure 8 from Locomotion efficiency of underwater snake robots with thrusters
Tracking Control in Presence of Obstacles and Uncertainties for Bioinspired Spherical Underwater Robots

Research Advancements in Key Technologies for Space-Based Situational Awareness

Figure 8 from Locomotion efficiency of underwater snake robots with thrusters
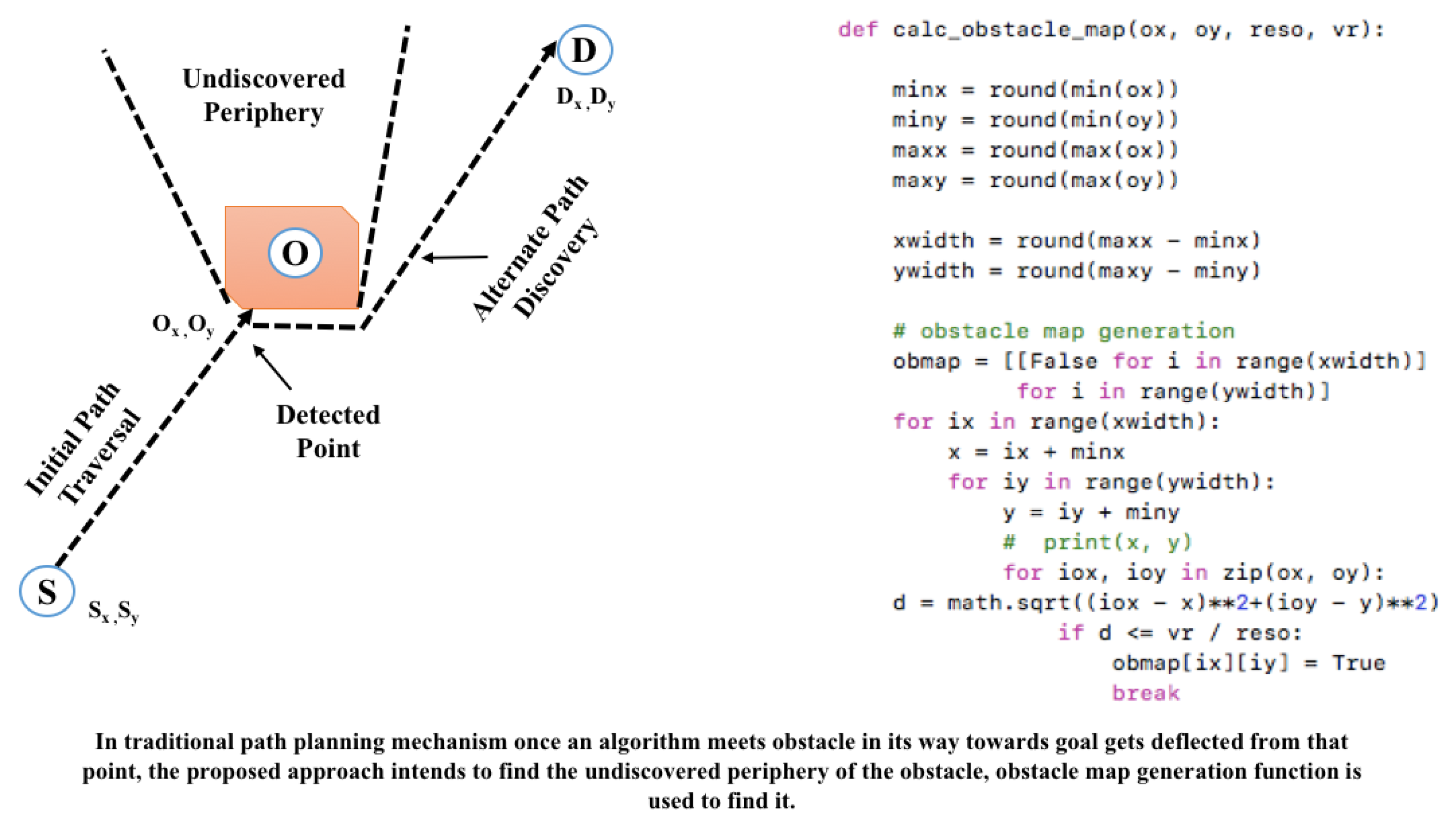
Frontiers Path Following, Obstacle Detection and Obstacle Avoidance for Thrusted Underwater Snake Robots

Full article: Design for snake robot motion via partial grasping on pipes

Sampling-based algorithms for optimal motion planning - Sertac Karaman, Emilio Frazzoli, 2011

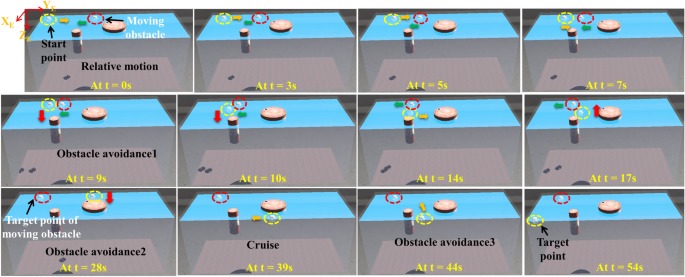
Trajectory planning in the presence of dynamic obstacles for Anguilliform-inspired robots
Applied Sciences, Free Full-Text

PDF) Finding the Gap: Neuromorphic Motion Vision in Cluttered Environments
Fuzzy Logic Control of a Head-movement Based Semi-autonomous Human–machine Interface
JMSE, Free Full-Text
Drones, Free Full-Text
de
por adulto (o preço varia de acordo com o tamanho do grupo)